PID PID Controller, Proportional Integral Derivative Controller PID 제어기 | (2024-05-28) |
Proportional Control, 비례 제어, Integral Control, 적분 제어, Derivative Control, 미분 제어 | |
▷
Top
▷
전기전자공학
▷
자동제어
▷
제어시스템 및 그 설계
1. PID 제어기 (Proportional Integral Derivative Controller) ㅇ 비례(P),적분(I),미분(D) 동작이 선형적으로 결합된 제어기 ※ 오랜 경험과 시행착오를 통해 개발되어온 제어 기법 - 주로, 근궤적법,주파수응답법 등에 의해 제어기 설계가 이뤄지며, - 산업현장에서 많이 쓰여져 왔음 2. PID 제어기의 동작 형태별 구분 ㅇ 비례 동작 (비례 제어), 비례 제어기 (Proportional Controller) - 오차 크기에 상수 비례 =>=> 현재 중시 (즉응성) . 제어기 출력이 제어기 입력에 비례적임
* 속응성 및 단순 비례 등 구현 용이 . 비례 이득 만을 사용한 종속 보상기 .. 성능상의 문제로 단독으로는 거의 사용 않고 미분 제어,적분 제어와 함께 사용됨 ㅇ 적분 동작, 적분 제어기 (Integral Controller) - 과거에서 현재까지의 오차 누적에 비례 =>
=> 과거 중시 (계속성)
* 일정 입력 및 외란에서 정상오차를 제거하는 효과 . 오차가 영이 될 때까지 제어 입력을 계속 유지하면 됨 ㅇ 미분 동작, 미분 제어기 (Derivative Controller,Rate Controller) - 오차 증가,감소 변화율에 비례 =>
=> 미래 중시 (예견성)
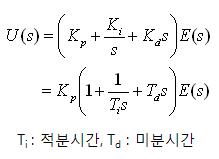
* 안정도 개선 및 좋은 동적 응답(과도응답 속도↑,오버슈트↓)을 주는 효과 . 시스템 잡음 성분이 있으면, 미분 값이 커지므로, 단독으로는 쓰이지 않음 3. 표준형 PID 제어기 ㅇ 블록선도
ㅇ 시간영역
ㅇ 주파수영역
"본 웹사이트 내 모든 저작물은 원출처를 밝히는 한 자유롭게 사용(상업화포함) 가능합니다"
[정보통신기술용어해설]